【面白い使い方】ラズパイでできること10選!

パソコン程高くなく、比較的高度な演算力のある小さなコンピューターのラズパイですが、
その汎用性やできることが多すぎて初心者にとってはわかりづらいと思います。また最初の内はその機能を活用するアイディアが思いつかないです。
ラズパイ買ったのはいいけど、何を作ればいいんだろう?
そのため、Lチカまではやったけど、その後何をしたらいいかわからなくて埃をかぶっているということもあると思います。
この記事ではそうした読者のために、汎用性を生み出しているラズパイの特徴を整理して機能の全体像を抑えつつ、まずは作り上げることを目的に、ハードウェアの作り方からソースコードまで載せた面白い活用事例を10個を紹介します。ぜひ参考にしてみてください!

ラズパイの活用事例
の2つをこの記事で解説します!
汎用性を生み出すラズパイの特徴
他のマイコンボードと比べてラズパイの特徴を見ていきたいと思います。
多様なセンサーやモーターを使うことができるGPIOとUSB
ラズパイのようなマイコンボードといったらモーターを使って力を加えたり、センサを使用して、外界の状態を読み取る機能だと思います。
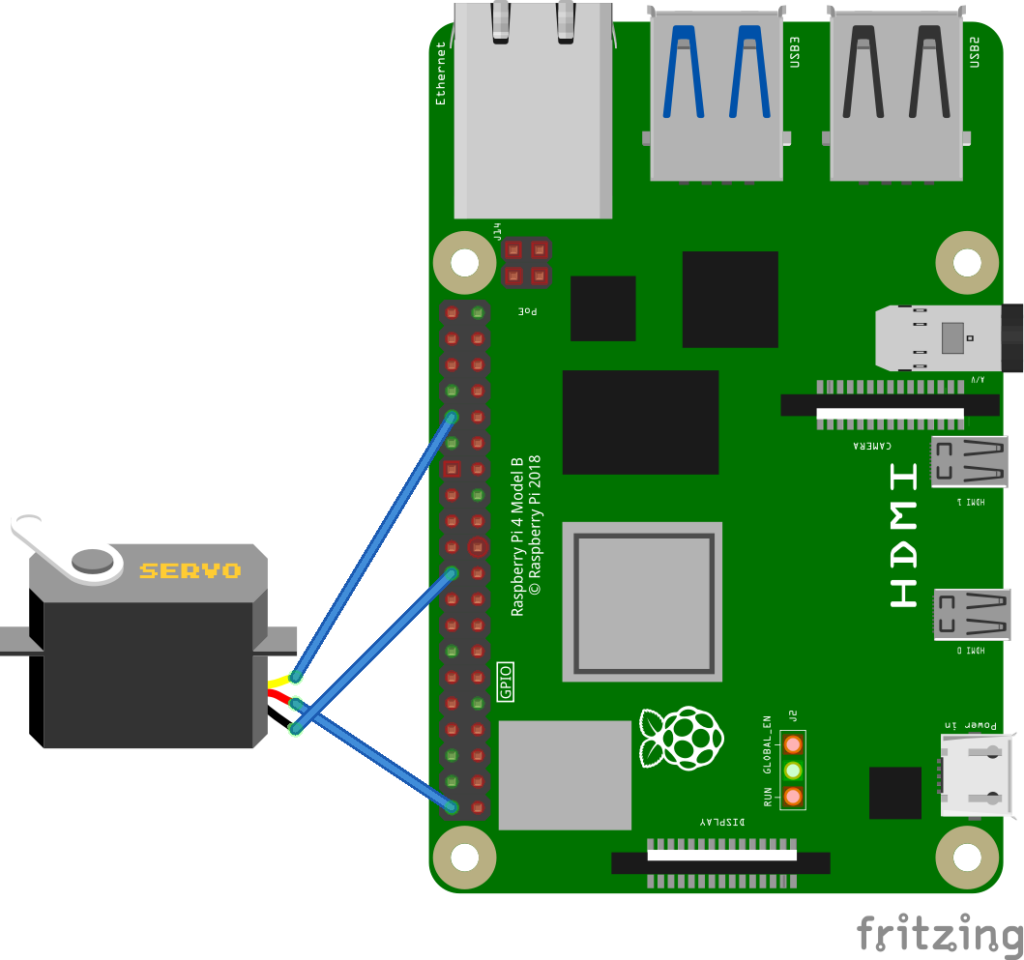
ラズパイには標準的に40pinのGPIOを備えており、これらと配線すると、そのモーターやセンサーを使用することができるようになります。例えばサーボモータを使用する場合はラズパイのピンの内、5V、GNDとGPIO12に配線すれば、そのサーボモータを動かす準備ができます。
またUSBも部品の接続口としてよく使用されます。カメラや自己位置推定に用いるLIDARはUSBのことが多いです。ラズパイはこのUSB接続口が4つと豊富にあり、不足の心配はあまり考えなくてよいと思います。

| RaspberryPi | Jetson Nano | Arduino | M5Stack | |
| GPIO | 40pin | 40pin | 20pin | 46pin |
| USB | 4つ | 4つ | なし | なし |
複数のラズパイ同士を繋げるWifiやBluetooth通信
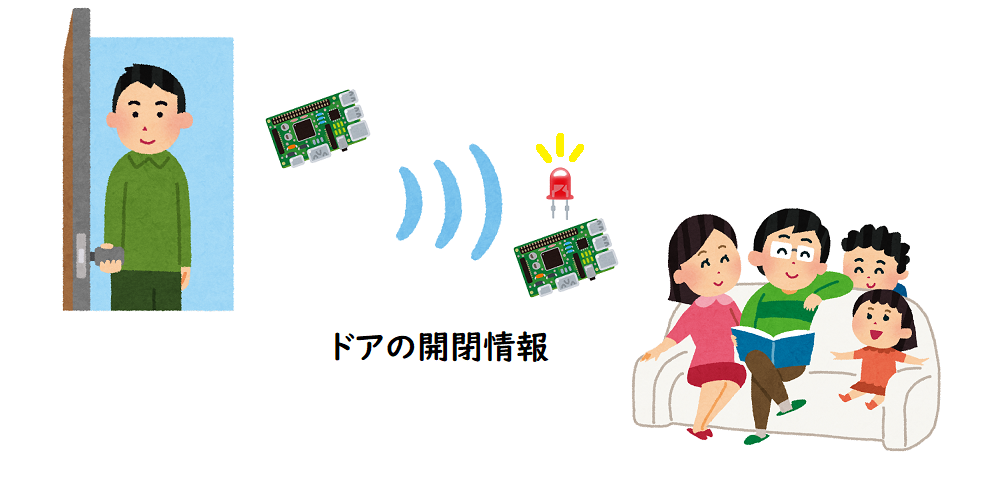
例えば誰かが帰宅した際にLEDを光らせて家族に伝えるといったシステムを作るとしましょう。その際は玄関にドアの開閉センサーを備えたラズパイとリビングにLEDを備えたラズパイを準備し、一方からもう一方のラズパイに対してWiFi通信してドアの開閉センサー情報を遠隔から送ってやり、LEDを光らせるとよいでしょう。こうしたセンシングする場所とアクションを起こす場所が遠いときにWi-FiやBluetooth通信が有効です。
ラズパイはWifiもBluetoothも標準で搭載されています。
| RaspberryPi | Jetson Nano | Arduino | M5Stack | |
| Wifi | あり | なし | なし | あり |
| Bluetooth | あり | なし | なし | あり |
負荷の高い計算にも耐えうるCPUやRAM
GPUを搭載したPCやJetson Nanoほど高速ではありませんが、ラズパイでも顔認識やハンドジェスチャー認識のような負荷の高い計算が可能です。メモリも一般的なPC程あり、ネットサーフィンも可能な程です。負荷の低い処理はArduino、負荷の高い処理はラズパイというように差別化するとよいでしょう。
| RaspberryPi | Jetson Nano | Arduino | M5Stack | |
| CPUクロック | 1.5 GHz Quad-core | 1.43GHz Quad-core | 16 MHz | 240MHz Dual-core |
| メモリ容量 | 8GB | 4GB | 2KB | 520KB |
OSの有無
ラズパイやJetson NanoにはLinuxOSが搭載されており、普段使用しているWindowsと同じようなデスクトップ環境でソフトウェアを実行させます。一方でArduinoやM5Stackは書き込まれているソフトが電源と同時に起動するようになっています。
| RaspberryPi | Jetson Nano | Arduino | M5Stack | |
| OS | Linux | Linux | 無し | 無し |
豊富なコミュニティ
ボードの人気は開発者人口やそのボードに関する情報に関わってきます。Google Trendによると4つのボードの中ではArduinoに次いで人気で、そのコミュニティの大きさが伺えます。これだけ人気ならすごくマイナーなセンサであっても、その解説記事が存在する確率はぐっと上がるでしょう。
必要なもの
ラズパイ本体はもちろんのこと、電力供給をするACアダプターやデータ記憶のためのMicroSDカード等、ラズパイを動作させるために必要なものがあるので紹介します。
ラズパイ本体
2024年2月13日から日本でもRaspberry Pi 5の販売が開始されました!基本的には現状最高スペックのRaspberry Pi 5を選ぶと良いでしょう。用途に合わせてメモリを選択し、動画等の負荷の重い処理を扱うときは8GBのものを選択するのが無難です。一方でスペックよりもサイズの方が重要であれば、一回り小さいRaspberry Pi Zero2が適しているかもしれません。最近は半導体の供給が少ないのでラズパイが手に入りにくくなっています。Raspberry Pi 5の入手が難しい場合、Raspberry Pi 3や4も選択肢に入れて良いかもしれません。
| Raspberry Pi 5 | Raspberry Pi 4 | Raspberry Pi 3 | Raspberry Pi Zero2 W | |
| CPU | 2.4GHz | 1.5 GHz | 1.4GHz | 1GHz |
| コア数 | 4 | 4 | 4 | 4 |
| メモリ | 1-8GB | 1-8GB | 1GB | 512MB |
| サイズ | 85 mm × 56 mm | 85 mm × 56 mm | 85 mm × 56 mm | 65 mm × 30 mm |

MicroSDカード
PCでいうハードディスクやSSDのようなOSをインストールしておいたり、ファイルをおいておく場所にあたるのがMicroSDカードです。データを貯められる容量とデータの読み書き速度が選定のポイントです。公式で8GB以上のものが推奨されているので、32GBくらいのものであれば大抵の用途で十分だと思います。データの読み書きには「UHSスピードクラス」という規格があり、3であれば現状最も速いので、資金に余裕があれば速いものを選ぶと良いと思います。

ACアダプター
電力供給するためにACアダプターも必要です。電圧5V、電流3Aのものを選びましょう。ラズパイには電源ボタンがついておらず、ACアダプターを接続し通電すると、起動するようになっています。ACアダプターには通電のON/OFFスイッチがついているものもあるので、そういったものを選ぶと便利です。

活用事例
上記のラズパイの特徴を抑えて活用事例を見てきましょう。気に入ったものがあったらぜひ作成してみてください!必要な部品、配線方法やソースコードがあるので、作る上での参考になると思います。
顔認証
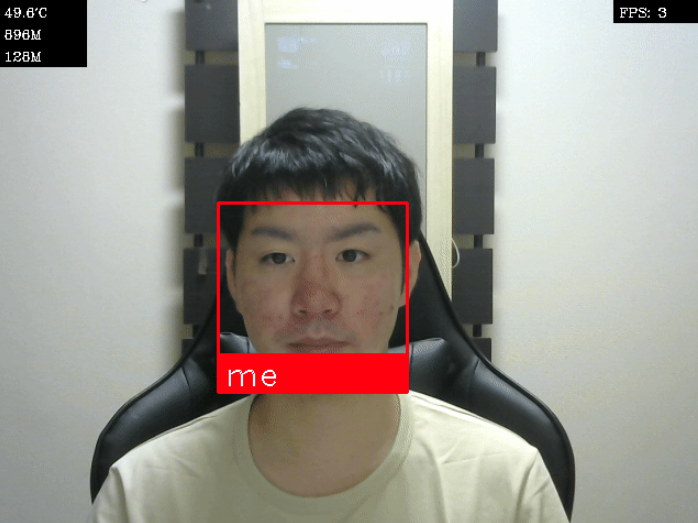
1つ目は顔認証です。ディープラーニングの登場によって脚光を浴びており、簡易な認証としてスマートフォンでも使用されています。ハードルが高そうですが、ラズパイとカメラさえあれば、作成することが可能です。
作り方はこちら

暗闇の中で顔認証

2つ目も顔認証ですが、赤外線カメラを使用しており暗闇でも認証可能です。寝室や映画館等の明かりをつけたくないシチュエーションで応用できそうです。
作り方はこちら

スマートミラー

3つ目はスマートミラーです。鏡に文字を浮かび上がらせるもので、天気やスケジュール等、好みでカスタマイズすることができます。仕組みは簡単でディスプレイの上にマジックミラーを重ねており、鏡の前の人の姿を映すこととディスプレイの映像も目に届くようにしています。マジックミラーの手配はディスプレイのサイズに合わせて作成してくれる便利な業者様がいるのでそちらに依頼しましょう。
作り方はこちら

トラッキングカメラ

4つ目は人の顔を追い続けるトラッキングカメラです。顔認識を使い人の顔を捉え、その方向にカメラを向けるようにモーターでコントロールしています。色々な応用が考えられそうなこのトラッキングカメラですが、例えば防犯カメラやアクションカメラにも適してそうです。
作り方はこちら

スマートロック
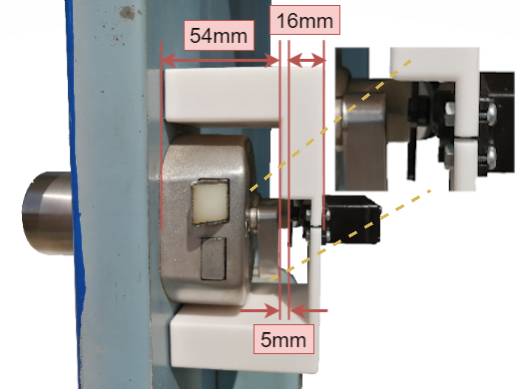
5つ目は定番のスマートロックです。製品としてもたくさんのものがリリースされていますが、自作することが可能です。鍵の形状に合わせてモーターを固定し、その回転力で開け閉めさせています。スマートフォンから開け閉めの指示ができるアプリも紹介しています。
作り方はこちら

ハンドポーズ認識
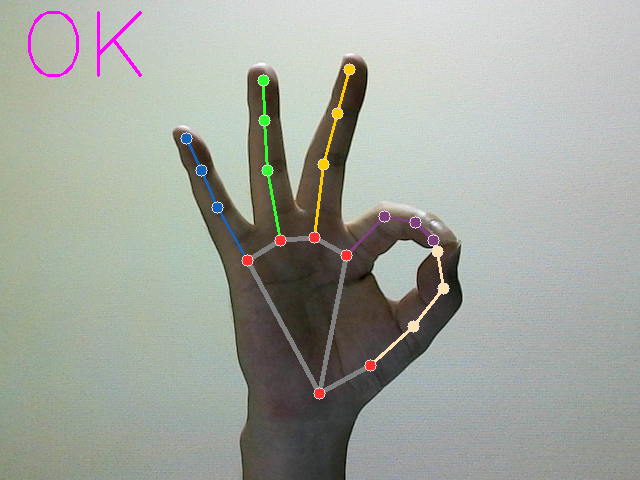
6つ目はハンドジェスチャー認識で、カメラ映像から手を抽出し、その手の形を認識することができます。ユーザーがボタンを押したりすることなく、手の形を変えるだけで様々な信号を作り出すことができます。
作り方はこちら

自動スプレー
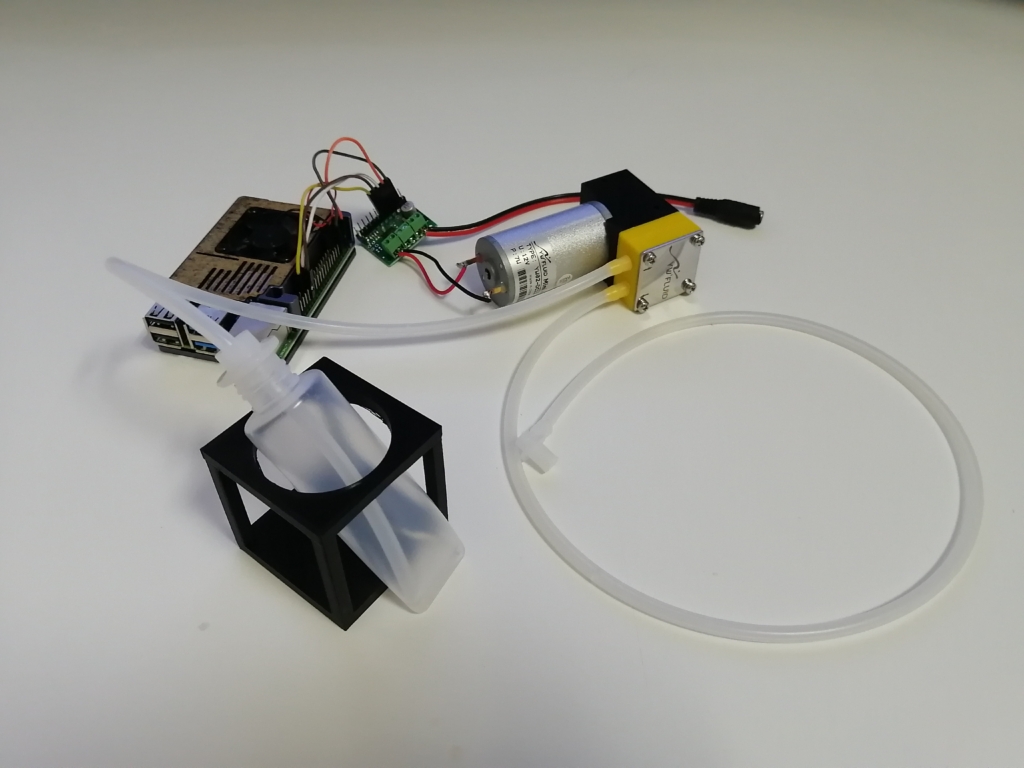
7つ目は自動スプレーです。よくある応用例としてはアルコールディスペンサーがあります。液体を貯蔵しているところからポンプを使って汲み上げ霧状にしてそれを噴き出すことができます。
作り方はこちら

直動機構

8つ目は直動機構です。モーターを駆動力にして、まっすぐ動く動作を作り出します。角度を変えれば上下移動も可能です。
作り方はこちら

四脚ロボット
9つ目は4脚ロボットです。動物を模したロボットで、物体を目で追う様はまるで生き物のようです。動画のロボットはKickStarterでクラウドファンディングしていた"Mini Pupper"というプロジェクトで、活発に活動を続けているようです。ROSというロボット用のOSで作成されているので、誰でもカスタマイズして、好きな動きをさせることができます。
作り方はこちら

ロボットアーム

10個目はロボットアームです。6軸のモーターを駆動力にしているので、複雑な動きや様々なタスクを実行することができます。動画の中では顔の位置をカメラで認識し、一定の距離を常に保つようなタスクを与えていて、非常に多様な動きをしています。ここで使用しているロボットアームは"myCobot"というElephant Robotics社の製品で、10万円というロボットアームにしては手の届きやすい価格になってます。
作り方はこちら

おわりに
いかがだったでしょうか。まずは作ってみることで作る前ではわからなかった勘所みたいなものが掴めると思います。また別のプロジェクトでも使えるようなソフトウェアや部品もあると思うので、ぜひチャレンジしてみてください!
ラズパイを購入したいなと思った方はこちら!